


3 软件可靠性设计
3.1 实时多任务的调度
保护器起着保护电动机的重任,对它的要求是既不能误动,也不能拒动,而且必须快速。实时多任务的调度实际是通过时间片的轮换实现宏观上的多任务效果。对于保护器而言,存在着三个重要的任务,等间隔的交流采样,根据算法得到稳态与暂态电量数据;根据得到的数据判断故障,故障计时、清零和脱扣输出;人机交互界面。下图以一个周波T=20mS,32点采样为例(考虑到快速除法),32次采样总时间为3.2mS,数据计算时间为9.72mS, 计时0.36mS,则人机交互的时间为6.72mS。这样的任务调度即满足了保护实时性要求,又较快的响应了参数设置。
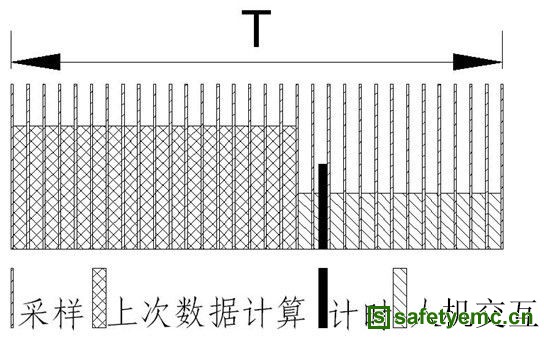
图7 任务执行关系
3.2 交流采样、数字滤波
对于交流正弦信号,一个周期的电压有效值为
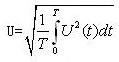
根据电工原理中连续周期交流信号的有效值的定义,将连续信号离散化,用数值积分代替连续积分,从而得到有效值与采样值之间的关系。离散化得到
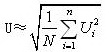
同理

在对信号多次采样的基础上,通过软件算法提取最逼近真值的数据。这种算法计算连续的周期的交流信号,精度高,抗波形畸变能力强。在使用这种算法时,也可同时采用连续平均值法、中值算法等数字滤波,提高保护器的抗干扰能力。
3.3 软件陷阱
程序是固化在微处理器的存储器中,由编译器统一安排,但设计时,设计人员考虑到产品的扩展性,一般留有余量,也因此总有些存储空间会未被使用。当微处理器的PC指针因为干扰被错置时,系统就会出错。软件陷阱就是在不用的存储空间、中断入口、子程序后加入强制跳转指令,让出错的PC指针恢复正常。
方法是:NOP
NOP
JSR MAIN
4 结束语
本文针对低压智能电动机保护器在实际使用中遇到的各种电磁兼容问题,根据微处理器系统的特点从硬件和软件两个方面,提出了抗干扰方法,获得了良好的EMC性能。





 苏公网安备32050802011615号
苏公网安备32050802011615号