


 |
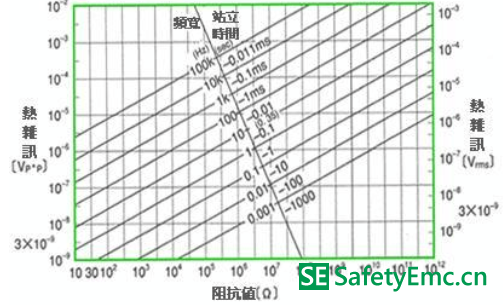
实用EMI噪讯对策技术(15) 模拟电路几乎所有数字电路的信号强度(level)都呈一定值,相较之下模拟电路的信号强度就非常纷歧,而且模拟电路的信号频宽也比较大,这意味着模拟电路无法作概括性处理。模拟电路噪讯 如图1所示模拟电路可以分成:*电阻器与电 ....
2017-12-140评论133
|
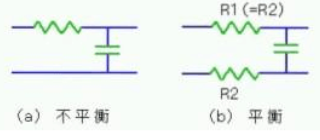 |
实用EMI噪讯对策技术(4) 平衡平衡的定义 平衡是强化噪讯时重要的性质,传输信号必需有往与返两条信号线,处理信号必需在信号线途径插入电子组件,形成所谓的「电子电路」,该电路同样必需设置可以使信号折返原点的结构。如图1所示由信号线与电子 ....
2017-12-140评论146
|
 |
实用EMI噪讯对策技术(2) 信号模式a.电路 如图1所示信号通过二条信号线传递,亦即信号必需经过「往」与「返」才能形成电路,电路原文「CIRCUIT」是指「往」与「返」,因此中译时称它为「回路」,一般则以「电路」概括性称呼,信号若不是往与返一巡构成 ....
2017-12-130评论88
|
|
实用EMI噪讯对策技术(8) 遮蔽(Shield)何谓遮蔽所谓遮蔽(Shield)是指阻碍在空中传输的噪讯而言,这些噪讯可分为”静电诱导”和”电磁波”两大类。静电遮蔽可以阻碍静电诱导;磁气遮蔽可以阻碍电磁诱导:电磁遮蔽可以阻碍电磁波。静电遮蔽与电磁遮蔽使用 ....
2017-12-130评论244
|
|
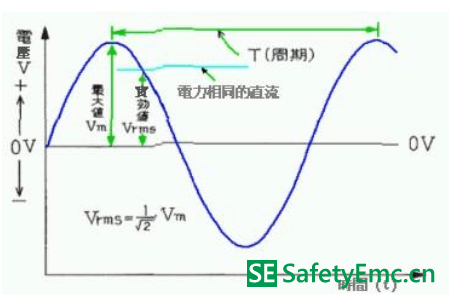
实用EMI噪讯对策技术(6) 反射反射现象所谓电流,是指电子的流动而言,直流时的电流好比是河流的水从上游朝下游流动,两者主要差异是电流必需通过传输线路才能流动。交流时的电气具备波的特性,而且是以波动方式传输,交流的流动好比是波在水面上 ....
2017-12-130评论120
|
 |
实用EMI噪讯对策技术(1) 基础物理篇几乎所有的电子硬件工程师工作上都会面临不同程度的电磁波干扰(EMI)问题,尤其是最近几年电子产品逐渐朝高功率、高传输速率、小型化方向发展,使得EMI问题越来越复杂多样化,事实上这正意味着充分掌握EMI特性,同时在 ....
2017-12-133评论548
|
|
实用EMI噪讯对策技术(5) 天线与噪讯放射噪讯会以静电诱诱导、电磁诱导、电磁波等形式在空中传输。电气的导体具有天线效应,也就是说天线除了可以放射电磁波之外,还会撷取在空中传输电磁波。 电子与电荷的物理特性 在物理学认为物质是由各种粒子构成,物质 ....
2017-12-130评论118
|
|
实用EMI噪讯对策技术(3) 噪讯与浪涌(Surge)在噪讯领域中有所谓「浪涌」一词,事实上浪涌(surge)是指强大脉冲状的噪讯而言;相对的引发电子组件或是电路暂时性误动作的噪讯一旦消失时,电子组件与电路能够立即恢复功能者统称为「噪讯(noise)」。狭义的噪讯是指 ....
2017-12-131评论647
|
|
实用EMI噪讯对策技术(19) 绝缘绝缘是噪讯对策上有效、而且非常重要的手段。信号除了分成标准模式信号(normal mode)与一般模式信号(common mode)之外,信号本身有一定的频宽,预期的信号使用标准模式,噪讯却是任意发生、任意传递,因此噪讯有标准 ....
2008-11-270评论141
|
|
实用EMI噪讯对策技术(18) 比较器比较IC可以判别2个输入电压的大小关系,输出0或是1的数字结果(图1),它的动作原理与电路结构,几乎与运算放大器完全相同,应用增幅器不施加回馈,就可以当作比较器(Compartor)使用,不过笔者建议最好使用专用比较IC ....
2008-11-210评论193
|


 苏公网安备32050802011615号
苏公网安备32050802011615号