


2 系统硬件的电磁兼容的设计
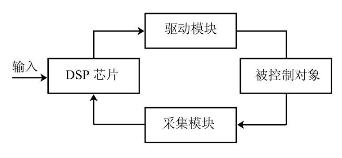
DSP电路的工作频率很高,芯片管脚很密,在与模拟器件一起进行数模混合设计时,对PCB版的设计要求很高[4]。以下为设计时必须遵守的准则和要求。
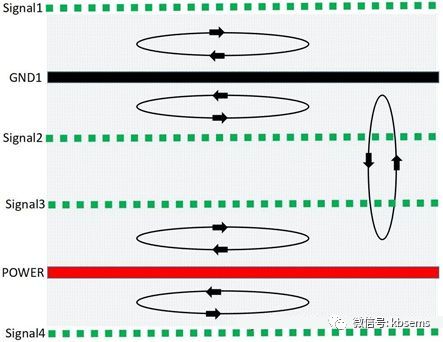
随着电子器件的小型化及封装密集化,有必要采用多层印刷电路板,其中包括单独的数字地层、电源层及其其它信号层。在布线时,单独设置的电源层有利于电路板元器件的布放;采用地层则不仅省去了大量器件管脚接地的工作量,而且可以有效地改善数字地线的质量。但应注意,在布孔、布线时应考虑通孔焊盘和过孔会将地层打断,过多的通孔会影响地层的抗干扰效果。本系统采用了四层板结构,分别为地层、电源层和两面元件层。在绘制PCB也特别考虑了通孔焊盘和过孔的使用,将尽可能多的网络在元件层布通。
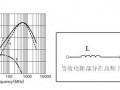
由于基于DSP的电动机控制系统使用的微处理器内核采用独立电源供电模式,因此对于具有144个管脚的TSM320LF2407A,需要较多的电源解
耦电容,为了节省空间,减小通孔数目,系统采用贴片电容,达到了较好的解耦效果。
接地应遵循的基本原则是:数字地、模拟地、屏蔽地应该合理接地,不能混用。尽可能的使接地电路各自形成回路,减少电路与地线之间的电流耦合。合理布置地线使电流局限在尽可能小的范围内,并根据地电流的大小和频率设计相应宽度的印刷电路和接地方式。DSP的A/D采样模拟电源引脚VCCA和VSSA必须区别于任何数字电压电源引脚,避免数字干扰信号通过地线耦合。同时,A/D转化器的模拟地线采用单点接触,数字地与模拟地在电源处连接并在此处接大地。VCCA和VSSA模拟引线在印刷电路板布线时应尽可能的短,以使二者正确匹配。
3 软件电磁兼容设计
TSM320LF2407A有丰富的指令集、极高的运行速度及软件看门狗(watchdog)和实时中断(RTI)模块,这些特点都为软件抗干扰提供了良好的条件。本系统主要采用以下几种软件抗干扰设计。
3.1软件陷阱法
由于干扰,往往会导致运行程序进入程序存储器的空白区(即无指令区),这种现象叫做程序“跑飞”。因此在各个子程序之间、各功能模块之间和所有空白处,都写上连续3个空操作(nop),后接一无条件转移指令,一旦程序跑飞到这些区域,就会自动返回执行正常程序。即:
Nop
Nop
Nop
LJMPADDRESS:ADDRESS指定地址;
3.2 程序的冗余设计
在程序存储器的空白区域,写入一些重要的数据表和程序作为备份,以便系统被破坏时仍有备份参数和程序维持系统正常工作。由于LF2407A的数据存储以数据页为基准,如果对不同数据页的数据进行操作而不指定相应的数据页,会导致程序跑飞。因此需要对程序未使用满的数据页进行填充,防止数据页混乱导致程序的系统误操作。
3.3 软件看门狗设计
看门狗定时器(WDT)又称监视定时器,可使微机系统从故障中恢复过来。在微机系统启动时,也启动WDT。它将对机器的状态周期进行计数,每一个状态周期计数器加1,当计数器溢出时,能自动的将复位引脚的电平拉低至少两个状态周期的时间,这个复位信号使得DSP复位。在正常工作时,定期的用软件去复位WDT,而不会使WDT溢出造成系统复位。可是,如果程序一旦“跑飞”进入死循环或误区,这时软件就不会复位WDT,从而使WDT的计数达到溢出而使系统复位。系统复位后又从000H单元开始执行程序,这样就可把“跑飞”的程序拉回到正常的程序中[5]。
4 结论
电磁兼容设计关系到基于DSP的电动机控制系统能否安全工作。电动机控制系统设计应根据系统的工作环境,控制系统的技术指标,工艺复杂性,成本等因素进行电磁兼容的综合设计。电动机控制系统的设计采用上述电磁兼容性设计,可使运行稳定可靠,故障率低,达到预期效果!
参考文献
[1] 区健昌,林守霖,吕英华.电子设备的电磁兼容性设计[M].北京:电子工业出版社,2004:22227.
[2] MontroseMI.电磁兼容和印刷电路板[M].刘元安,李书芳,译.北京:人民邮电出版社,2002:4212.
[3] PaulCR.电磁兼容导论[M].闻映红,译.北京:机械工业出版社,2006.
[4] 顾海州,马双武.PCB电磁兼容技术[M].北京:清华大学出版社,2004.
[5] 张毅刚,赵光权,孙宁,等.DSP原理、开发与应用[M].哈尔滨:哈尔滨工业大学,2006.
作者简介:朱时强 男 重庆交通大学 硕士研究生 从事自动控制技术的研究





 苏公网安备32050802011615号
苏公网安备32050802011615号