


四、工科医机器人试验布置
工科医机器人试验布置应符合 GB/T 6113.201-2018和GB/T 6113.203-2016 的规定,工科医机器人的测量布置方式按照上表中的要求进行。

1. 台式工科医机器人传导骚扰试验布置
为了测量传导骚扰,工科医机器人要按下列要求通过一个或多个人工网络连接到供电电源和任何其他延伸网络 (通常,V 型人工电源网络用于电源端口,见图 1。不论接地与否,台式工科医机器人都应按下述规定放置:
1)工科医机器人的底部或背面应放置在离参考接地平面 40 cm 的可操纵的距离上。该接地平面通常是屏蔽室的某个墙面或地板,它也可以是一个至少为 2 mX2 m 的接地金属平板。实际布置可以按下述方法来实现:
a. 工科医机器人放在一个至少 80 cm 高的绝缘材料试验台上,它离屏蔽室的任一墙面为40 cm;或
b. 工科医机器人放在一个 40 cm 高的绝缘材料试验台上,使得其底部高出接地平面 40 cm。
2) 工科医机器人所有其他的导电平面与参考接地平板之间的距离要大于 40 cm。
3) 工科医机器人的电缆连接如图 1 所示。
4)如图 1 所示,那些人工电源网络是通过这样的方式搭接在接地平面上,即人工网络外壳的一个侧面距离垂直参考接地平面及其他的金属部件为 40 cm。V 型人工电源网络和Y型阻抗稳定网络,如图 1所示。
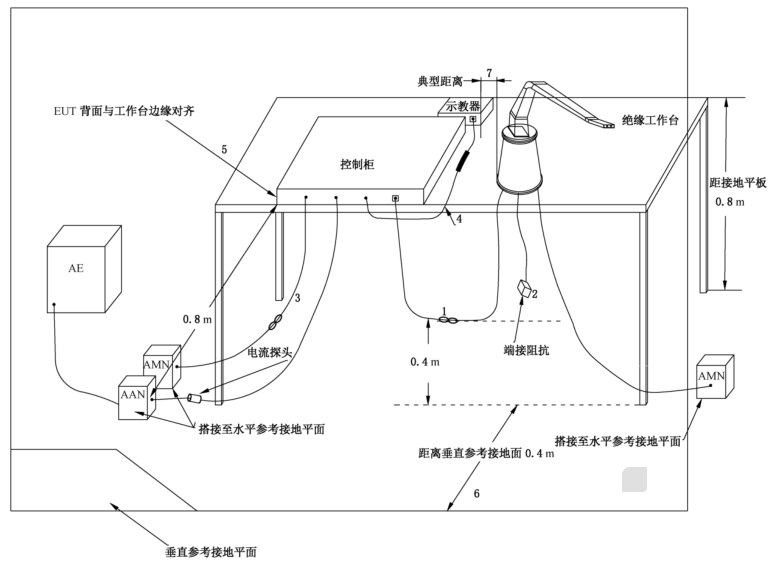
图1 台式工科医机器人传导骚扰测量的试验布置
2. 落地式工科医机器人传导骚扰试验布置
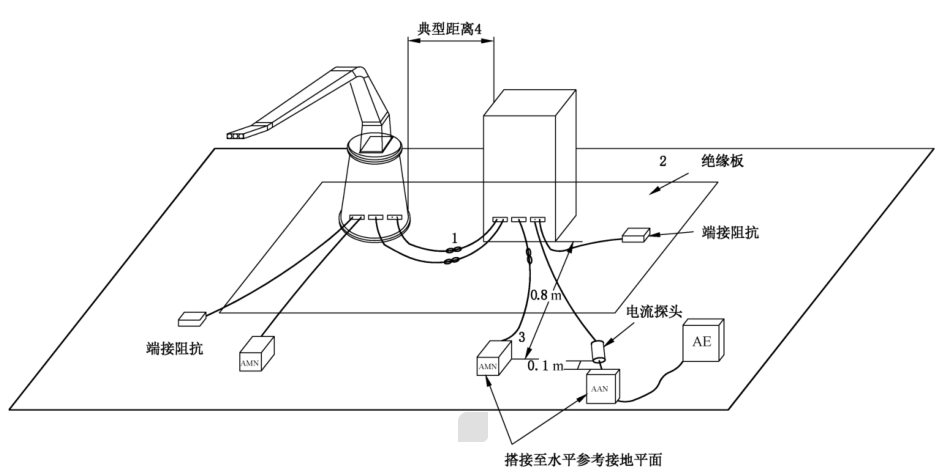
图2 落地式工科医机器人传导骚扰测量的试验布置
1).超长电缆应在其中心处捆扎或缩短到适当的长度。
2).工科医机器人和电缆应与接地平面绝缘(绝缘板厚度不超过15 cm)
3).工科医机器人连到一个 AMN上,所有其他的设备应由第二个AMN来供电
4).典型距离是指按照制造商声明的就,或者间距确保不干涉工科医机器人手臂的工作空间,但是至少应有0.1m的距离。
落地式工科医机器人的布置见图3,落地式工科医机器人的固定底座不考虑底座的材质(但应确保机器人工作时的稳定性),需要用不高于15 cm非导电材料支撑。对于大型工科医机器人,难以拾高或无法保持稳定运行时,可以按照实际使用的安装方式进行布置,但应在试验报告中进行详细描述。




 苏公网安备32050802011615号
苏公网安备32050802011615号